Last Updated on February 19, 2013 by nghiaho12
This is a follow up on my last post about trying to use RBM to extract meaningful visual features. I’ve been experimenting with a sparsity penalty that encourages the hidden units to rarely activate. I had a look at ‘A Practical Guide to Training Restricted Boltzmann Machines’ for some inspiration but had trouble figuring out how their derived formula fits into the training process. I also found some interesting discussions on MetaOptimize pointing to various implementations. But in the end I went for a simple approach and used the tools I learnt from the Coursera course.
The sparsity is the average probability of a unit being active, so they are applicable to sigmoid/logistic units. For my RBM this will be the hidden layer. If you look back in my previous post you can see the weights generate random visual patterns. The hidden units are active about 50% of the time, hence the random looking pattern.
What we want to do is reduce the sparsity so that the units are activated on average a small percentage of the time, which we’ll call the ‘target sparsity’. Using a typical square error, we can formulate the penalty as:
^2")
\right)")
- K is a constant multiplier to tune the gradient step.
- s is the current sparsity and is a scalar value, it is the average of all the MxN matrix elements.
- t is the target sparsity, between [0,1].
Let the forward pass starting from the visible layer to the hidden layer be:

")

- w is the weight matrix
- x is the data matrix
- b is the bias vector
- z is the input to the hidden layer
The derivative of the sparsity penalty, p, with respect to the weights, w, using the chain rule is:

The derivatives are:
 \;\; \leftarrow scalar")

")

The derivative of the sparsity penalty with respect to the bias is the same as above except the last partial derivative is replaced with:

In actual implementation I omitted the constant 
Results
I used an RBM with the following settings:
- 5000 input images, normalized to
- no. of visible units (linear) = 64 (16×16 greyscale images from the CIFAR the database)
- no. of hidden units (sigmoid) = 100
- sparsity target = 0.01 (1%)
- sparsity multiplier K = 1.0
- batch training size = 100
- iterations = 1000
- momentum = 0.9
- learning rate = 0.05
- weight refinement using an autoencoder with 500 iterations and a learning rate of 0.01

and this is what I got
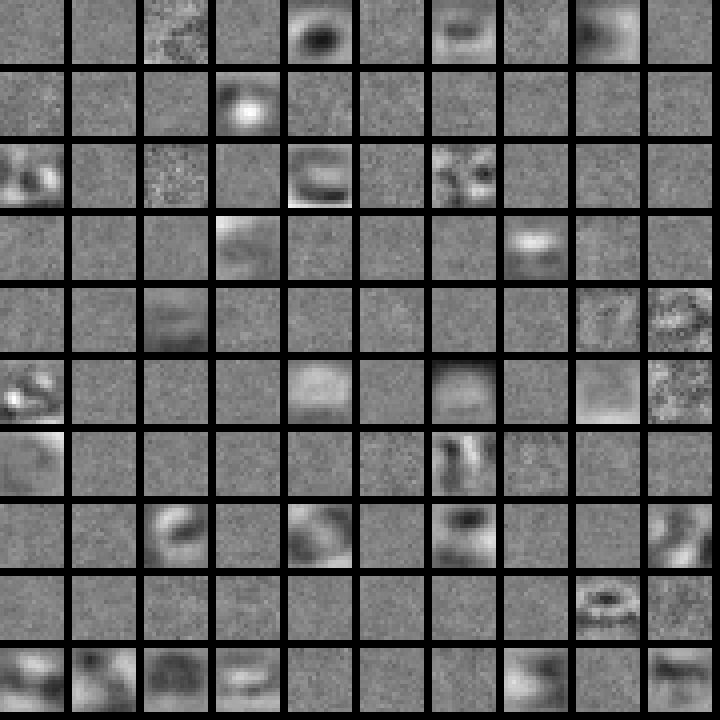 Quite a large portion of the weights are nearly zerod out. The remaining ones have managed to learn a general contrast pattern. It’s interesting to see how smooth they are. I wonder if there is an implicit L2 weight decay, like we saw in the previous post, from introducing the sparsity penalty. There are also some patterns that look like they’re still forming but not quite finished.
Quite a large portion of the weights are nearly zerod out. The remaining ones have managed to learn a general contrast pattern. It’s interesting to see how smooth they are. I wonder if there is an implicit L2 weight decay, like we saw in the previous post, from introducing the sparsity penalty. There are also some patterns that look like they’re still forming but not quite finished.
The results are certainly encouraging but there might be an efficiency drawback. Seeing as a lot of the weights are zeroed out, it means we have to use more hidden units in the hope of finding more meaningful patterns. If I keep the same number of units but increase the sparsity target then it approaches the random like patterns.
Download
Have a look at the README.txt for instructions on obtaining the CIFAR dataset.







