Last Updated on March 11, 2017 by nghiaho12
In the previous post I wrote a C++ implementation of the EKF localization algorithm from the Probabilistic Robotics book. As a continuation I also wrote an implementation for the EKF SLAM with known data association algorithm. This is similar to EKF localization except we’re also estimating the landmarks position and uncertainty. The code can be found here.
https://github.com/nghiaho12/EKF_SLAM
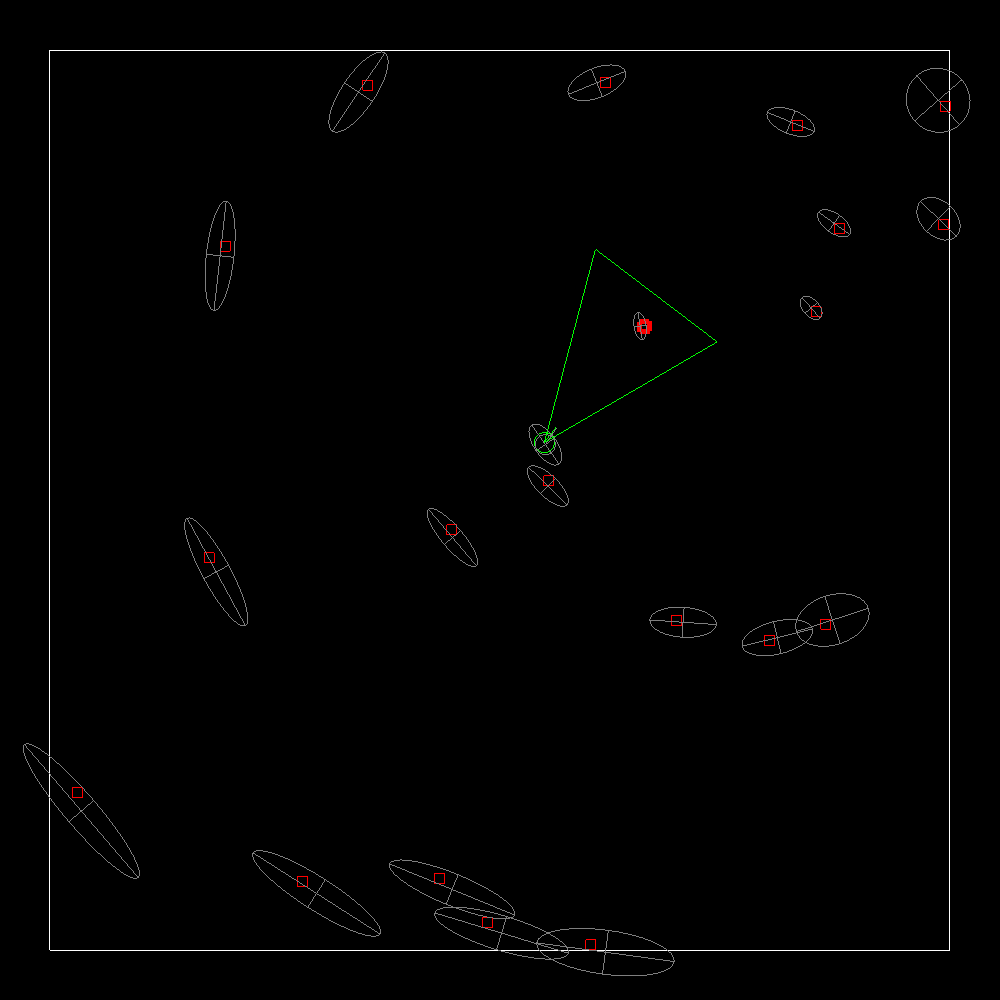
Here’s a screenshot of it in action.