Last Updated on February 25, 2017 by nghiaho12
Been a while since I posted anything. I recently found some free time and decided to dust off the Probabilistic Robotics book by Thrun et. al. There are a lot of topics in the book that I didn’t learn formally back during school.
I’ve used the vanilla Kalman Filter for a few projects in the past but not the extended Kalman Filter. I decided to implement the Extended Kalman Filter localization with known correspondences algorithm. The simulation consists of a robot with a range sensor that can detect known landmarks in the world. You move the robot around using the arrow keys. The simulation is written in C++ and uses SDL and OpenGL. Below shows a screenshot. The true pose is in green, gray the EKF estimate and 95% confidence ellipse, red are the landmarks.
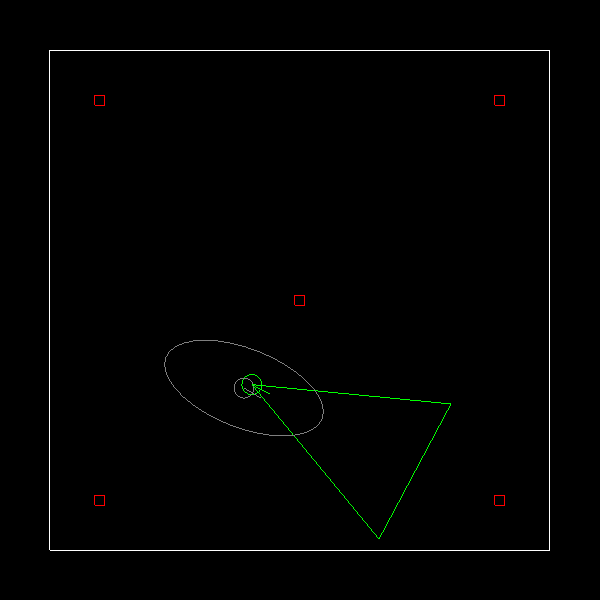
One addition I made was handle the case when angular velocity is zero. The original algorithm presented in the book would result in a divide by zero. You can grab and play with the code here.
An interesting behavior that I’ve been trying to understand is the EKF covariance can shrink (reduce uncertainty), even if you are only doing predictions (no correction using landmark). It’s either a coding bug or some side effect of linearization. Either way, it’s driving me nuts!
https://github.com/nghiaho12/EKF_localization_known_correspondences